As of this writing, there are about 7.38 billion people in the world. Accounting for births and deaths, global population goes up by about 200,000 people each day. The number of humans on Earth is expected to peak around 10 billion near the end of this century, though predictions certainly vary. What does all this mean?
In 1968, Paul Ehrlich published _The Population Bomb. _He predicted mass starvation and global chaos–breakdowns in order, in society. The collapse of civilization. These events were not to occur in some far-flung future, but in the then-near ‘70s and ‘80s. Ehrlich also advocated for extreme measures such as forced mass sterilization. Today, it seems almost miraculous that few governments took any serious steps based on his predictions. To a large degree, this probably resulted from poor governmental responsiveness in general. Governments respond much more readily to small and localized problems than large, catastrophic ones, even when the latter can be predicted well in advance. Climate change is another example where government institutions seem largely paralyzed from taking substantive action to prevent (or, at this point, mitigate) an impending disaster.
But how did the panic over population originate? The idea that there are (or soon will be) too many humans to feed wasn’t new in the ‘60s. The notion goes at least as far back as the late 18th century to Thomas Malthus, who postulated that runaway human population growth naturally corrected itself through war, famine, and other causes of mass death–events called, in his dubious honor, “Malthusian catastrophes.” One of the ideas most commonly pulled from Malthus’ writings was that excessive population growth can be blamed primarily on the poorer classes, who were said to reproduce with abandon. In fact, Malthus and his followers even believed that offering charity to the poor encouraged them to have more and more children, thus exacerbating poverty and leading to eventual disaster.
It is not difficult to draw a line from such rhetoric to the conservative ideology of today, in which the poor are demonized as deadbeat baby factories and shiftless criminals, lazy parasites who only want to soak up resources better spent on worthy, hardworking folks. The rhetoric hasn’t changed much despite the utterly different reality.
Is overpopulation a problem now? If we look at global population trends, population growth is slowing. Growth (though not population) has already peaked in the US, and in a third of US counties, deaths are exceeding births. The US is by no means special in this regard. Fertility rates in most of the world are low–near or below replacement levels–and falling. (In case you are unaware, a fertility rate is the number of children born, on average, for each woman.)
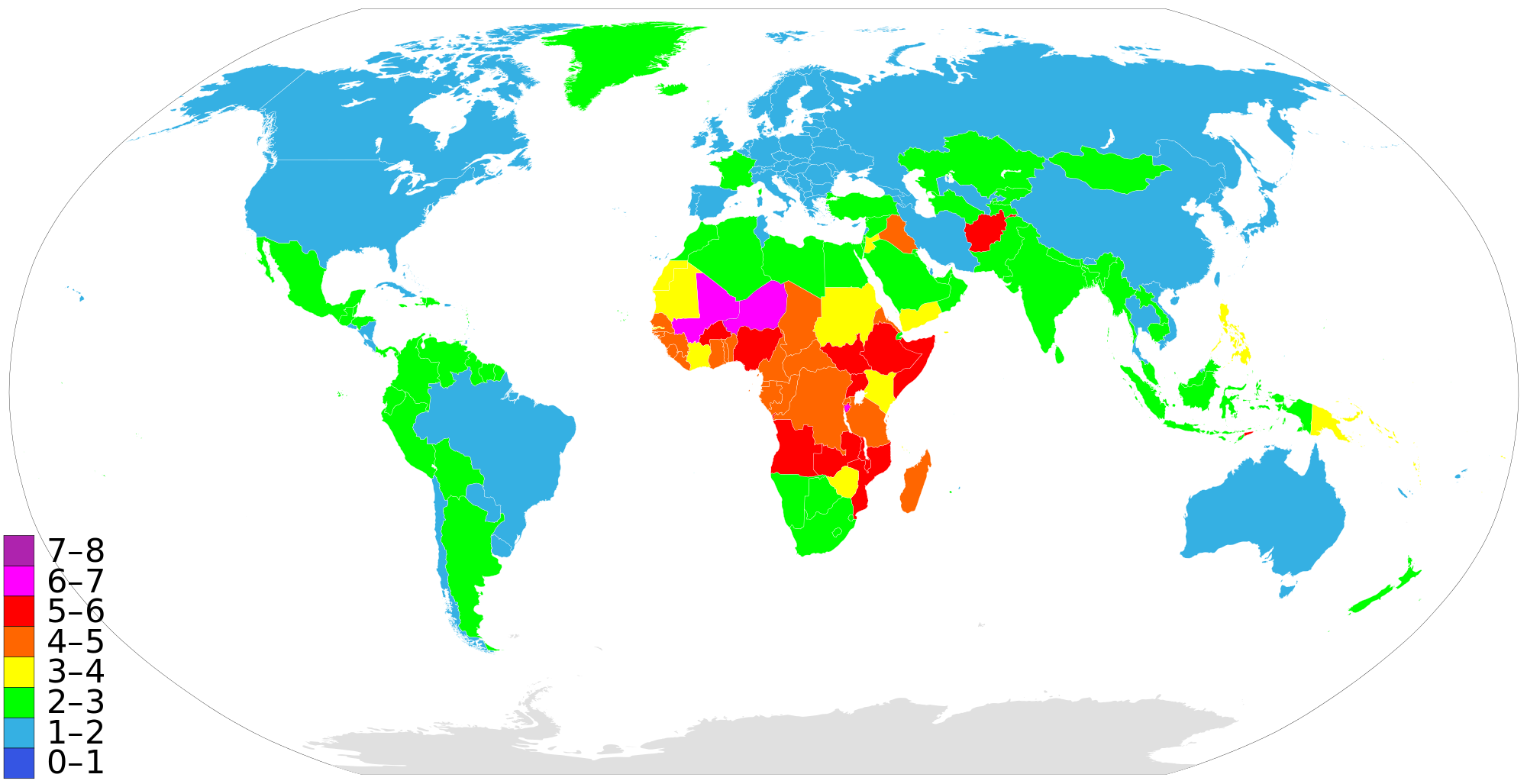
[caption id=“attachment158” align=“aligncenter” width=“767”][ ](http://www.resilientconstructs.com/wp-content/uploads/2015/11/Countriesbyfertilityrate.svg_.png) From Wikipedia (based on CIA World Factbook data)[/caption]
Countries with a fertility rate less than 2 (actually more like 2.1-2.3) face falling rates of growth and eventually population declines. This is the rule in the developed world, and the same trends are occurring–albeit with considerable lag–in the developing world, as well.
Before moving on to what this means, what’s causing it? Historically, humans had high birth rates and high death rates. War and interpersonal violence weren’t the causes–diseases were. Specifically, malaria alone is thought to have killed possibly half of all the people who have ever lived. People died, all the time. Hygiene was poor, medical science was crude, and if you had a lot of kids, it was because most of them would die young and you had to play the odds to make sure enough survived to carry on and support the family. Before the twentieth century, infant mortality ranged from 20% to over 50%, depending on factors such as the weather and food harvests. Human mortality was dramatically improved by a combination of better hygiene along with the discoveries of antibiotics and vaccination. As these innovations spread around the world, it took a while for birth rates to adjust in response. In the case of the United States, fertility rates have steadily declined since the early 1800s–on the map above, the US would have been colored pink 200 years ago, as would have most of the world. And though there was a baby boom in many countries after World War II, after a couple decades fertility rates regressed back to the downward trend that existed prior. What were once countries with high birth rates and high death rates became countries with high birth rates and low death rates, and eventually low birth rates as well as low death rates.
Birth rates, it seems, are highly sensitive to economic conditions. Economic booms produce baby booms; depressions plunge birth rates, sometimes well below replacement. It has been thought that, on average, these fluctuations even out. If booms and busts come in more or less equal cycles, and bad economic conditions simply cause people to put off having children until things improve, then long-term population trends are unaffected.
But what if economic conditions remain poor over a long period and other pressures keep birth rates depressed? This has been the case in Japan, which has practically stagnated economically for the past 20 years, and has seen birth rates collapse over the past 40. After 2007, population actually began to decline. While birth rates have rebounded slightly, it’s not enough to increase the population again, nor even to level it off. A side effect of this is that the population distribution also becomes inverted. Generally speaking, in a healthy population distribution, young people outnumber old ones. But in Japan, the reverse is true, and the situation is only getting worse.
China faces a similar problem thanks to the One-Child Policy that it only very recently reversed. Other countries, particularly in Europe, will have to contend with aging populations and the stresses those will likely place on public resources. Immigration is, in part, being used as a measure to alleviate the issue: immigrants come in mainly from relatively impoverished countries with higher birth rates. As it takes some time (perhaps a few generations) for the birth rates of immigrants to settle down to a level more typical of the host country, the most severe effects of having an aging population can be deferred for a while.
With regard to the countries from which migrants are originating: their fertility and birth rates are falling, too, so they will probably face the same issues, eventually. That is, assuming the trends hold. They have thus far, in some cases for many decades. With the available examples, the rates do eventually bottom out and recover slightly, but whether the bottom is found somewhere above, below, or right at replacement level seems to vary, albeit not by much. No matter how you slice it, though, global population growth is slowing down. It is not clear when or if it will stop, but barring some impact to humanity with effects as profound as the industrial revolution (something we can’t rule out), global population looks poised to stabilize, if not decline, within the next century or so.
Circling back to the original talk of Ehrlich and Malthus, it was believed that inadequate food supplies would be the ultimate cause of a population crash. Today, though, food supplies aren’t the problem. We have enough food to feed everyone, and then some. With widespread use of our most efficient agricultural methods, we could feed many more. And yet, hunger and starvation persist. The causes of this are political rather than material. Putting the underlying factors aside for now–most of them involving economic inequality and political strife, which deserve a full airing in the future–if there is a threat posed by the presence of too many humans, it has more to do with consumption of other resources, not food.
Fresh water, for instance, is threatened. The current disaster unfolding in Syria may be due in no small part to the politics of water supplies.
Climate change also threatens to reshape the planet. Some areas currently inhabitable will not be. Kuwait will be too hot; the Maldives will be submerged.
What do these have in common? Consumption. In particular, Americans are the most ravenous consumers on the planet. It is a notorious (and true) factoid that Americans make up 1⁄20 of the world’s population but account for 1⁄4 of all energy consumption. Other developed countries have high consumption, as well, but to a lesser extent. What drives this consumption? To put it simply: growth-addicted capitalism. Capitalism itself may be able to function without demanding an endless growth trajectory (this remains to be seen), but as implemented here and now, companies (and economies) that do not constantly grow are considered failures. Since industrialization began a trend of increasing worker productivity, and with that trend having later been aided by the computer revolution–both of these fed by cheap energy–it has been commonly believed that endless growth is not only possible, it’s the way things have always been and always shall be.
But these are temporary, fleeting factors that look doomed to peak. We will reduce our reliance on fossil fuels, either because they become politically untenable, unprofitable, or physically exhausted–or some combination of all three. As no source of energy on Earth (besides nuclear) offers the same energy return on energy invested, overall energy consumption will necessarily have to be reduced. Per worker productivity may continue to increase along the same linear trend as it has for the past several decades, but with fewer workers around as a consequence of lower birth rates, overall production may flatline or even decrease. Automation can soften this blow, but it is questionable how much automation will be needed to fuel the consumption of a flat or dwindling population that no longer has access to (or even a desire for) cheap energy.
At this point, I am well into speculation. Following on from yesterday’s post, to which this one might be considered a sequel of sorts, it it likely that the only way forward is sustainability. This means relying primarily on renewable energy sources, more careful stewardship of other physical resources (such as fresh water, lumber, rare earth metals, etc.), and reorienting economic activity around overall stability rather than chasing runaway growth. The latter will likely end up offering the greatest shocks to our way of life, and yet it looks unavoidable if one takes all the trends into account. It may be a new iteration of capitalism, or socialism, or something else entirely. There is little doubt that there will also be much (frankly, needless) suffering as a consequence of climate change. People will be displaced, homes and cities will be destroyed, and there may even be widespread political upheaval as a result of such disruptions. Will it devolve into large scale armed conflict? It’s possible, though one would certainly hope not.
What is more certain is that current trends in terms of population growth, consumption, and economic development are setting us up for a major change. It may take decades and may not play out its full effects in our lifetimes, but aging and shrinking populations along with serious environmental pressures will force us to rethink how we consume–how we live. The prospect of population growth slowing to a halt and possibly declining, then, is a sign of hope rather than despair. Not only did the “population bomb” defuse itself, the convergence of trends that began decades ago will force us to change yet again, whether we like it or not.
I prefer to be optimistic, though. The human species is nothing if not adaptable.

{kind=link}
{kind=link}
{kind=link}